Vectors and the Geometry of Space
Three-Dimensional Coordinate Systems
The three-dimensional coordinate system expresses a point in space with three parameters, often length, width and depth ([latex]x[/latex], [latex]y[/latex], and [latex]z[/latex]).Learning Objectives
Identify the number of parameters necessary to express a point in the three-dimensional coordinate systemKey Takeaways
Key Points
- There are many types of coordinate systems, including Cartesian, spherical, and cylindrical coordinates.
- In the Cartesian system, all three of the parameters are represented as the quantitative distance from the reference plane.
- In order to convert from Cartesian to spherical, you need to convert each parameter separately, as follows: [latex]r = \sqrt{x^2+y^2+z^2}\\ \theta=\arccos (\frac{z}{r})\\ \varphi =\arctan (\frac{y}{x})[/latex]
Key Terms
- coordinate system: a method of representing points in a space of given dimensions by coordinates from an origin
- origin: the point at which the axes of a coordinate system intersect
The Three Dimensional Coordinate System
A three dimensional space has three geometric parameters: [latex]x[/latex], [latex]y[/latex], and [latex]z[/latex]. These are often referred to as length, width and depth. Each parameter is perpendicular to the other two, and cannot lie in the same plane. shows a Cartesian coordinate system that uses the parameters [latex]x[/latex], [latex]y[/latex], and [latex]z[/latex].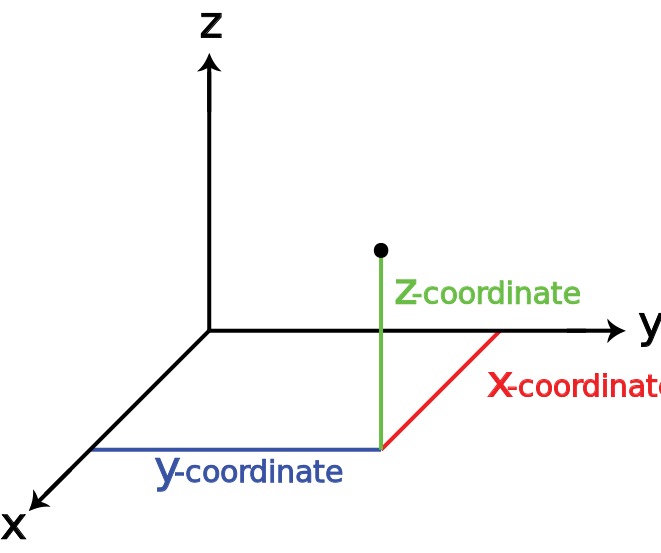
Three-Dimensional Space: This is a three dimensional space represented by a Cartesian coordinate system.
Cartesian Geometry
Also known as analytical geometry, this system is used to describe every point in three dimensional space in three parameters, each perpendicular to the other two at the origin. Each parameter is labeled relative to its axis with a quantitative representation of its distance from its plane of reference, which is determined by the other two parameter axes.Other Coordinate Systems
Cylindrical Coordinates ([latex]\rho, \varphi, z[/latex])
The cylindrical system uses two linear parameters and one radial parameter:- [latex]\rho[/latex]: the radial distance from the point to [latex]z[/latex]
- [latex]\varphi[/latex]: the angle between the reference direction and the point
- [latex]z[/latex]: the distance from the reference plane to the point
Cylindrical Coordinate System: The cylindrical coordinate system is like a mix between the spherical and Cartesian system, incorporating linear and radial parameters.
Spherical Coordinates ([latex]r[/latex], [latex]\theta[/latex], [latex]\varphi[/latex])
The spherical system is used commonly in mathematics and physics:- [latex]r[/latex]: the radial distance from the origin to the point
- [latex]\theta[/latex]: the angle between the zenith direction and directional vector of [latex]r[/latex]
- [latex]\varphi[/latex]: the angle from the reference direction to the orthogonal plane projected by the directional vector of [latex]r[/latex]
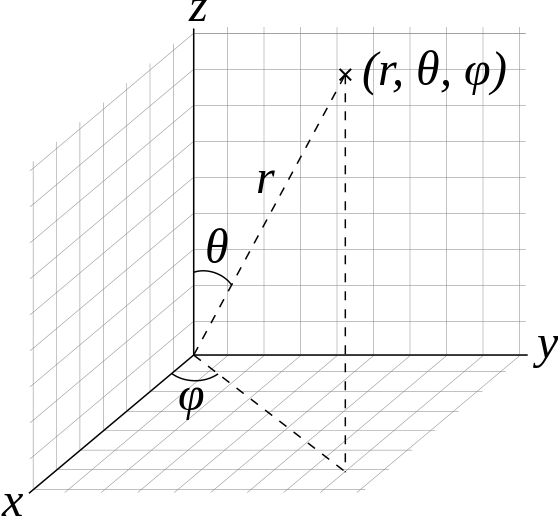
Spherical Coordinate System: The spherical system is used commonly in mathematics and physics and has variables of [latex]r[/latex], [latex]\theta[/latex], and [latex]\varphi[/latex].
Cartesian to Spherical
Often, you will need to be able to convert from spherical to Cartesian, or the other way around. The following equations will allow you to do just that: [latex-display]\displaystyle{r = \sqrt{x^2+y^2+z^2}}[/latex-display] [latex-display]\displaystyle{\theta=\arccos \left(\frac{z}{r}\right)}[/latex-display] [latex-display]\displaystyle{\varphi =\arctan \left(\frac{y}{x}\right)}[/latex-display]Vectors in the Plane
Vectors are needed in order to describe a plane and can give the direction of all dimensions in one vector equation.Learning Objectives
Calculate the directions of the normal vector and the directional vector of a reference pointKey Takeaways
Key Points
- In order to adequately describe a plane, you need more than a point—you need a normal vector.
- The normal vector is perpendicular to the directional vector of the reference point.
- You can find the equation of a vector that describes a plane by using the following equation: [latex]a (x-x_0) + b ( y-y_0) + c(z-z_0)=0[/latex].
Key Terms
- vector: a directed quantity, one with both magnitude and direction; the signed difference between two points
- normal: a line or vector that is perpendicular to another line, surface, or plane
Vectors in the Plane
Planes in a three dimensional space can be described mathematically using a point in the plane and a vector to indicate its "inclination".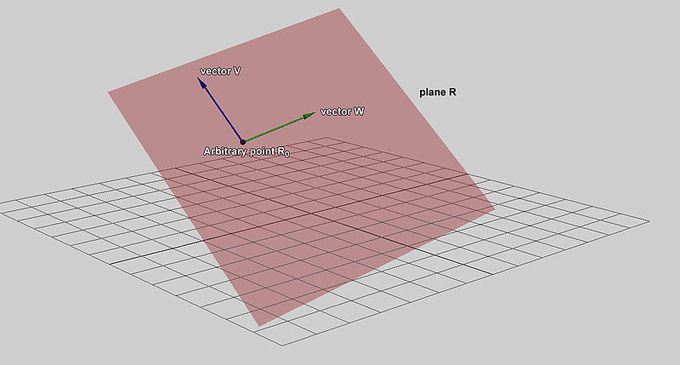
Normal Vector to a Plane: This plane may be described parametrically as the set of all points of the form[latex]\mathbf R = \mathbf {R}_0 + s \mathbf{V} + t \mathbf{W}[/latex], where [latex]s[/latex] and [latex]t[/latex] range over all real numbers, [latex]\mathbf{V}[/latex] and [latex]\mathbf{W}[/latex] are given linearly independent vectors defining the plane, and [latex]\mathbf{R_0}[/latex] is the vector representing the position of an arbitrary (but fixed) point on the plane. The vectors [latex]\mathbf{V}[/latex] and [latex]\mathbf{W}[/latex] can be visualized as vectors starting at [latex]\mathbf{R_0}[/latex] and pointing in different directions along the plane. Note that [latex]\mathbf{V}[/latex] and [latex]\mathbf{W}[/latex] can be perpendicular but not parallel.
General form of the equation of the plane
In order to find the equation of the plane, consider the following: Let [latex]\mathbf{r}_0[/latex] be the position vector of some point [latex]\mathbf{P_0} = (x_0,y_0,z_0)[/latex], and let [latex]\mathbf{n} = (a,b,c)[/latex] be a nonzero vector. The plane determined by this point and vector consists of those points [latex]P[/latex], with position vector [latex]\mathbf{r}[/latex], such that the vector drawn from [latex]P_0[/latex] to [latex]P[/latex] is perpendicular to [latex]\mathbf{n} [/latex]. Recall that two vectors are perpendicular if and only if their dot product is zero. As such, the equation that describes the plane is given by: [latex-display]\mathbf{n} \cdot (\mathbf{r}-\mathbf{r}_0)=0[/latex-display] We can expand this equation in terms of its components to give: [latex-display]a (x-x_0)+ b(y-y_0)+ c(z-z_0)=0[/latex-display] which we call the point-normal equation of the plane and is the general equation we use to describe the plane.Vectors in Three Dimensions
A Euclidean vector is a geometric object that has magnitude (i.e. length) and direction.Learning Objectives
Practice representing an Euclidean vector in the Cartesian coordinate systemKey Takeaways
Key Points
- Vectors play an important role in physics.
- In the Cartesian coordinate system, a vector can be represented by identifying the coordinates of its initial and terminal point.
- The coordinate representation of vectors allows the algebraic features of vectors to be expressed in a convenient numerical fashion.
- Vectors can be added to other vectors according to vector algebra.
Key Terms
- tensor: a multidimensional array satisfying a certain mathematical transformation
- pseudovector: a quantity that transforms like a vector under a proper rotation but gains an additional change of sign under an improper rotation

Vector in 3D Space: A vector in the 3D Cartesian space, showing the position of a point [latex]A[/latex] represented by a black arrow. [latex]\mathbf{i}[/latex], [latex]\mathbf{j}[/latex], and [latex]\mathbf{k}[/latex] are unit vectors along the [latex]x[/latex]-, [latex]y[/latex]-, and [latex]z[/latex]-axes, respectively.
The Dot Product
The dot product takes two vectors of the same dimension and returns a single value.Learning Objectives
Formulate properties of the dot product, including the algebraic and geometric methods used to calculate itKey Takeaways
Key Points
- The dot product can be found algebraically or geometrically. The algebraic method employs the sum of the products of corresponding parameters, and the geometric method uses the product of the magnitudes of the vectors and the cosine of the angle between them.
- The dot product is a commutative property.
- The dot product is a distributive property.
Key Terms
- commutative: such that the order in which the operands are taken does not affect their image under the operation
- cross product: also called a vector product; results in a vector which is perpendicular to both of the vectors being multiplied and therefore normal to the plane containing them
The Dot Product
The dot product takes two vectors and returns a single value. The dot product can only be taken from two vectors of the same dimension. The dot product is the sum of the product of the corresponding parameters. Geometrically, the dot product is the product of the magnitudes of two vectors and the cosine of the angle between them. This is different from the cross product, which gives an answer in vector form.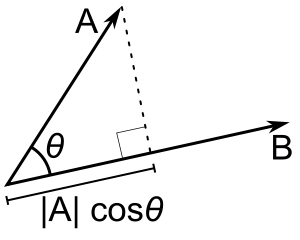
Dot Product: When finding the dot product geometrically, you need the magnitudes of the vectors and the angle between them.
- [latex]\vec a \cdot \vec b = a_1b_1 + a_2b_2 + a_3b_3[/latex]
- [latex]\vec A \cdot \vec B = | A | |B | \cos \theta[/latex]
Properties
Some of the properties of the dot product are- The dot product is a commutative property, which means that the order of the terms does not change the outcome: [latex]\vec a \cdot \vec b = \vec b \cdot \vec a[/latex]
- The dot product is a distributive property: [latex]\vec a \cdot ( \vec b+ \vec c ) = \vec a \cdot \vec b + \vec a \cdot \vec c[/latex]
- If two vectors are normal (perpendicular) to each other, their dot product will be equal to zero: [latex]\vec a \cdot \vec b = 0[/latex]
Example
Find the dot product of the two vectors [latex]\vec{Q}(5,2,8)[/latex] and [latex]\vec{R}(6,-2,9)[/latex]: [latex-display]\vec Q \cdot \vec R = Q_1 R_1 + Q_2 R_2 + Q_3 R_3 \\ = 5 \cdot 6 + 2 \cdot ( -2) + 8 \cdot 9 \\ = 98[/latex-display]The Cross Product
The cross product of two vectors is a vector which is perpendicular to both of the original vectors.Learning Objectives
Calculate the cross product of two vectorsKey Takeaways
Key Points
- Since the cross product is perpendicular to both original vectors, it is also normal to the plane of the original vectors.
- If the two original vectors are parallel to each other, the cross product is zero.
- The cross product can be found both algebraically and geometrically.
Key Terms
- parallelogram: a convex quadrilateral in which each pair of opposite edges is parallel and of equal length
- perpendicular: at or forming a right angle (to)
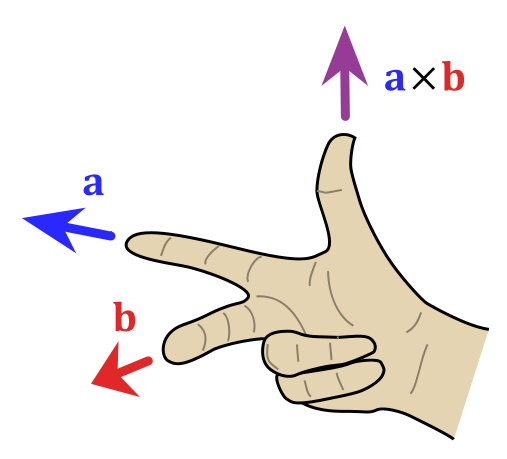
The Right Hand Rule: If you use the rules shown in the figure, your thumb will be pointing in the direction of vector [latex]c[/latex], the cross product of the vectors.
Equations of Lines and Planes
A line is a vector which connects two points on a plane and the direction and magnitude of a line determine the plane on which it lies.Learning Objectives
Explain the relationship between the lines and three dimensional geometric objectsKey Takeaways
Key Points
Key Terms
- vector: a directed quantity, one with both magnitude and direction; the signed difference between two points
- slope: also called gradient; slope or gradient of a line describes its steepness
Lines and Planes
A line is described by a point on the line and its angle of inclination, or slope. Every line lies in a plane which is determined by both the direction and slope of the line. A line is essentially a representation of a cross section of a plane, or a two dimensional version of a plane which is a three dimensional object.Equations of Lines and Planes
The components of equations of lines and planes are as follows: A line in three dimensional space is given by a point, [latex]P_0 (x_o,y_o,z_o)[/latex], or a plane, [latex]M[/latex], and its direction. This direction is described by a vector, [latex]\mathbf{v}[/latex], which is parallel to plane and [latex]P[/latex] is the arbitrary point on plane [latex]M[/latex]. The position vector of point [latex]P_0[/latex] is called [latex]\mathbf{r}_0[/latex] and the position vector of point [latex]P[/latex] is called [latex]\mathbf{r}[/latex]. The vector from [latex]P[/latex] to [latex]P_0[/latex] is called vector [latex]\mathbf{a}[/latex]. Vectors [latex]\mathbf{a}[/latex] and [latex]\mathbf{v}[/latex] are parallel to each other. Now, we can use all this information to form the equation of a line on plane [latex]M[/latex]. The vector equation of a line is: [latex-display]\mathbf{r} = \mathbf{r}_0 + t \mathbf{v}[/latex-display] where [latex]t[/latex] represents the location of vector [latex]\mathbf{r}[/latex] on plane [latex]M[/latex]. The parametric equation of a line can be written as: [latex]x = x_0 + at \\ y=y_0 +bt \\ z = z_0 +ct[/latex] Or the more compact form: [latex-display]<x, y, z> \ = \ </x_0>[/latex-display]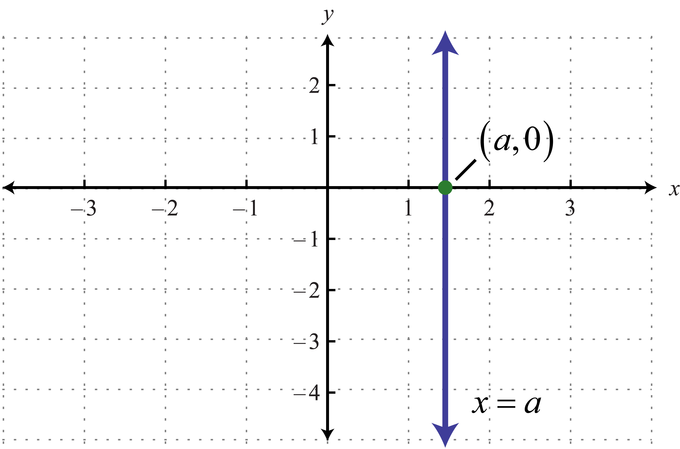
Vertical Line, Graphed: Vertical line [latex]x = a[/latex], lying on the [latex]xy[/latex]-plane ([latex]z=0[/latex]).
Cylinders and Quadric Surfaces
A quadric surface is any [latex]D[/latex]-dimensional hypersurface in [latex](D+1)[/latex]-dimensional space defined as the locus of zeros of a quadratic polynomial.Learning Objectives
Define a quadratic surfaceKey Takeaways
Key Points
- A cylinder is one of the most basic curvilinear geometric shapes, the surface formed by the points at a fixed distance from a given line segment, the axis of the cylinder.
- A cylinder can be seen as a polyhedral limiting case of an n-gonal prism where n approaches infinity.
- A quadric, or quadric surface, is any [latex]D[/latex]-dimensional hypersurface in [latex](D+1)[/latex]-dimensional space defined as the locus of zeros of a quadratic polynomial.
- Cylinders, spheres, ellipsoids, etc. are special cases of quadric surfaces.
Key Terms
- polynomial: an expression consisting of a sum of a finite number of terms, each term being the product of a constant coefficient and one or more variables raised to a non-negative integer power
- hypersurface: a [latex]n[/latex]-dimensional surface in a space (often a Euclidean space) of dimension [latex]n+1[/latex]
Cylinder
A cylinder (from Greek "roller" or "tumbler") is one of the most basic curvilinear geometric shapes. The surface is formed by the points at a fixed distance from a given line segment, the axis of the cylinder. The solid enclosed by this surface and by two planes perpendicular to the axis is also called a cylinder. The surface area and the volume of a cylinder have been known since antiquity. A cylinder can be seen as a polyhedral limiting case of an [latex]n[/latex]-gonal prism where [latex]n[/latex] approaches infinity.
Cylinder: A right circular cylinder with radius [latex]r[/latex] and height [latex]h[/latex].
Quadric Surface
A quadric, or quadric surface, is any [latex]D[/latex]-dimensional hypersurface in [latex](D+1)[/latex]-dimensional space defined as the locus of zeros of a quadratic polynomial. In coordinates [latex]\{x_1, x_2, \cdots, x_{D+1} \}[/latex], the general quadric is defined by the algebraic equation: [latex-display]\displaystyle{\sum_{i,j=1}^{D+1} x_i Q_{ij} x_j + \sum_{i=1}^{D+1} P_i x_i + R = 0}[/latex-display] Cylinders, spheres, ellipsoids, etc. are special cases of quadric surfaces.Examples
Ellipsoid: [latex-display]\displaystyle{{x^2 \over a^2} + {y^2 \over b^2} + {z^2 \over c^2} = 1}[/latex-display] Sphere: [latex-display]\displaystyle{{x^2 \over a^2} + {y^2 \over a^2} + {z^2 \over a^2} = 1}[/latex-display] Elliptic paraboloid: [latex-display]\displaystyle{{x^2 \over a^2} + {y^2 \over b^2} - z = 0}[/latex-display] Cone: [latex-display]\displaystyle{{x^2 \over a^2} + {y^2 \over b^2} - {z^2 \over c^2} = 0}[/latex-display] Parabolic cylinder: [latex-display]x^2 + 2ay = 0[/latex-display]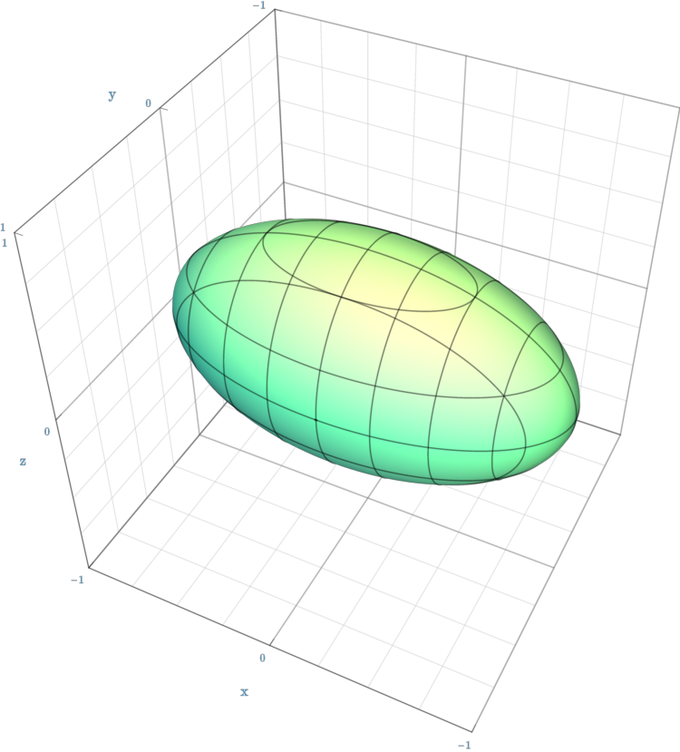
Ellipsoid: An ellipsoid given as [latex]{x^2 \over a^2} + {y^2 \over b^2} + {z^2 \over c^2} = 1[/latex].
Cylindrical and Spherical Coordinates
Cylindrical and spherical coordinates are useful when describing objects or phenomena with specific symmetries.Learning Objectives
Distinguish between cylindrical and spherical coordinate systemsKey Takeaways
Key Points
- A cylindrical coordinate system is a three-dimensional coordinate system that specifies point positions by three numbers [latex](\rho, \varphi, z)[/latex].
- Cylindrical coordinates are useful in connection with objects and phenomena that have some rotational symmetry about the longitudinal axis.
- A spherical coordinate system is a coordinate system for three-dimensional space where the position of a point is specified by three numbers [latex](r, \theta, \varphi)[/latex].
Key Terms
- azimuth: an arc of the horizon intercepted between the meridian of the place and a vertical circle passing through the center of any object
- Cartesian: of or pertaining to co-ordinates based on mutually orthogonal axes
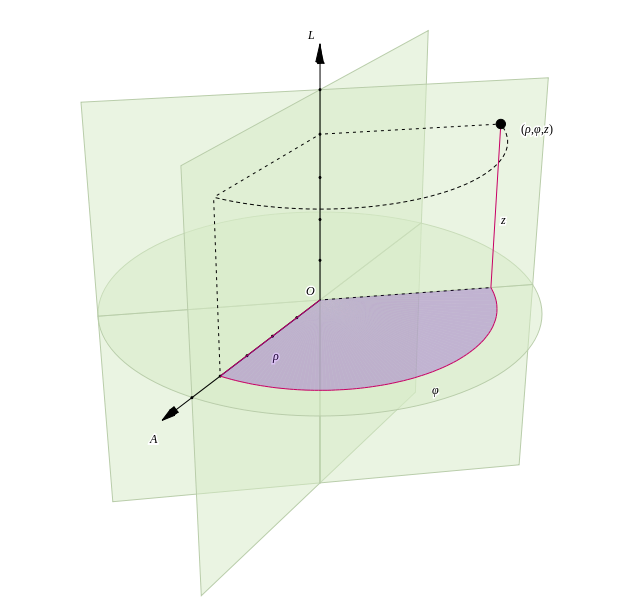
Cylindrical Coordinates
A cylindrical coordinate system is a three-dimensional coordinate system that specifies point positions by the distance from a chosen reference axis, the direction from the axis relative to a chosen reference direction, and the distance from a chosen reference plane perpendicular to the axis. The latter distance is given as a positive or negative number, depending on which side of the reference plane faces the point.
Cylindrical Coordinate System: A cylindrical coordinate system with origin [latex]O[/latex], polar axis [latex]A[/latex], and longitudinal axis [latex]L[/latex]. The dot is the point with radial distance [latex]\rho = 4[/latex], angular coordinate [latex]\varphi = 130[/latex] degrees, and height [latex]z = 4[/latex].
Spherical Coordinates
A spherical coordinate system is a coordinate system for three-dimensional space where the position of a point is specified by three numbers: the radial distance of that point from a fixed origin, its polar angle measured from a fixed zenith direction, and the azimuth angle of its orthogonal projection on a reference plane that passes through the origin and is orthogonal to the zenith, measured from a fixed reference direction on that plane. Spherical coordinates are useful in connection with objects and phenomena that have spherical symmetry, such as an electric charge located at the origin.
Spherical Coordinate System: Spherical coordinates ([latex]r[/latex], [latex]\theta[/latex], [latex]\varphi[/latex]) as often used in mathematics: radial distance [latex]r[/latex], azimuthal angle [latex]\theta[/latex], and polar angle [latex]\varphi[/latex]. The meanings of [latex]\theta[/latex] and [latex]\varphi[/latex] have been swapped compared to the physics convention.
Surfaces in Space
A surface is a two-dimensional, topological manifold.Learning Objectives
Explain the meaning of the two-dimensionality of surfacesKey Takeaways
Key Points
- To say that a surface is "two-dimensional" means that, about each point, there is a coordinate patch on which a two-dimensional coordinate system is defined.
- The concept of surface finds application in physics, engineering, computer graphics, and many other disciplines, primarily in representing the surfaces of physical objects.
- Surfaces could be the locus of zeros of certain functions, usually polynomial functions.
Key Terms
- parametric: of, relating to, or defined using parameters
- meridian: an imaginary great circle on the Earth's surface, passing through the geographic poles
- manifold: a topological space that looks locally like the "ordinary" Euclidean space and is Hausdorff
Example
In Cartesian coordinates, a sphere can be defined parametrically—e.g., by: [latex]x = r \sin \theta \cos \varphi\\ y=r\sin\theta\sin\varphi\\ z=r\cos\theta[/latex] or implicitly—e.g., by: [latex-display]x^2 + y^2 + z^2 − r^2 = 0[/latex-display] In spherical coordinates, the surface can be expressed simply by [latex]r=R[/latex].
A Sphere Defined Parametrically: A sphere can be defined parametrically or implicitly.
Licenses & Attributions
CC licensed content, Shared previously
- Curation and Revision. Provided by: Boundless.com License: CC BY-SA: Attribution-ShareAlike.
CC licensed content, Specific attribution
- Spherical coordinate system. Provided by: Wikipedia Located at: https://en.wikipedia.org/wiki/Spherical_coordinate_system. License: CC BY-SA: Attribution-ShareAlike.
- John Taylor, Vector Orthogonal to a Plane. May 5, 2014. Provided by: OpenStax CNX Located at: https://cnx.org/contents/f399e6a7-eed2-437d-9029-962e0f644903@1. License: CC BY: Attribution.
- Cylindrical coordinates. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- origin. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- coordinate system. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- Coord system CY 1. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- 3D Spherical. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Coord planes color. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- Plane (geometry). Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- normal. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- vector. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- Coord system CY 1. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- 3D Spherical. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Coord planes color. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- PlaneR. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Euclidean vector. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- tensor. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- pseudovector. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- Coord system CY 1. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- 3D Spherical. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Coord planes color. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- PlaneR. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Euclidean vector. Provided by: Wikipedia License: CC BY: Attribution.
- Dot product. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- commutative. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- cross product. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- Coord system CY 1. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- 3D Spherical. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Coord planes color. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- PlaneR. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Euclidean vector. Provided by: Wikipedia License: CC BY: Attribution.
- Dot Product. Provided by: Wikipedia Located at: https://en.wikipedia.org/wiki/File:Dot_Product.svg. License: Public Domain: No Known Copyright.
- Cross product. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- parallelogram. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- perpendicular. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- Coord system CY 1. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- 3D Spherical. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Coord planes color. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- PlaneR. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Euclidean vector. Provided by: Wikipedia License: CC BY: Attribution.
- Dot Product. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Right hand rule cross product. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- Linear equation. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- slope. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- vector. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- Coord system CY 1. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- 3D Spherical. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Coord planes color. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- PlaneR. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Euclidean vector. Provided by: Wikipedia License: CC BY: Attribution.
- Dot Product. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Right hand rule cross product. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- Linear equation. Provided by: Wikipedia License: CC BY: Attribution.
- Cylinder (geometry). Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- Quadric. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- hypersurface. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- polynomial. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- Coord system CY 1. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- 3D Spherical. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Coord planes color. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- PlaneR. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Euclidean vector. Provided by: Wikipedia Located at: https://en.wikipedia.org/wiki/Euclidean_vector. License: CC BY: Attribution.
- Dot Product. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Right hand rule cross product. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- Linear equation. Provided by: Wikipedia License: CC BY: Attribution.
- Quadric. Provided by: Wikipedia License: CC BY: Attribution.
- Cylinder (geometry). Provided by: Wikipedia License: CC BY: Attribution.
- Spherical coordinate system. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- Cylindrical coordinate system. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- azimuth. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- Cartesian. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- Coord system CY 1. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- 3D Spherical. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Coord planes color. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- PlaneR. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Euclidean vector. Provided by: Wikipedia License: CC BY: Attribution.
- Dot Product. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Right hand rule cross product. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- Linear equation. Provided by: Wikipedia License: CC BY: Attribution.
- Quadric. Provided by: Wikipedia License: CC BY: Attribution.
- Cylinder (geometry). Provided by: Wikipedia License: CC BY: Attribution.
- Spherical coordinate system. Provided by: Wikipedia License: CC BY: Attribution.
- Cylindrical coordinate system. Provided by: Wikipedia License: CC BY: Attribution.
- Surface. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- manifold. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- meridian. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- parametric. Provided by: Wiktionary License: CC BY-SA: Attribution-ShareAlike.
- Coord system CY 1. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- 3D Spherical. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Coord planes color. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- PlaneR. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Euclidean vector. Provided by: Wikipedia License: CC BY: Attribution.
- Dot Product. Provided by: Wikipedia License: Public Domain: No Known Copyright.
- Right hand rule cross product. Provided by: Wikipedia License: CC BY-SA: Attribution-ShareAlike.
- Linear equation. Provided by: Wikipedia License: CC BY: Attribution.
- Quadric. Provided by: Wikipedia License: CC BY: Attribution.
- Cylinder (geometry). Provided by: Wikipedia License: CC BY: Attribution.
- Spherical coordinate system. Provided by: Wikipedia License: CC BY: Attribution.
- Cylindrical coordinate system. Provided by: Wikipedia Located at: https://en.wikipedia.org/wiki/Cylindrical_coordinate_system. License: CC BY: Attribution.
- Surface. Provided by: Wikipedia License: CC BY: Attribution.
